I figured time for an update....only 10 months since last one....but 2x house moves later.....
got all the parts made so stripped the trailer right down to get all the Aluminium bits anodized. Now in the process of final build:


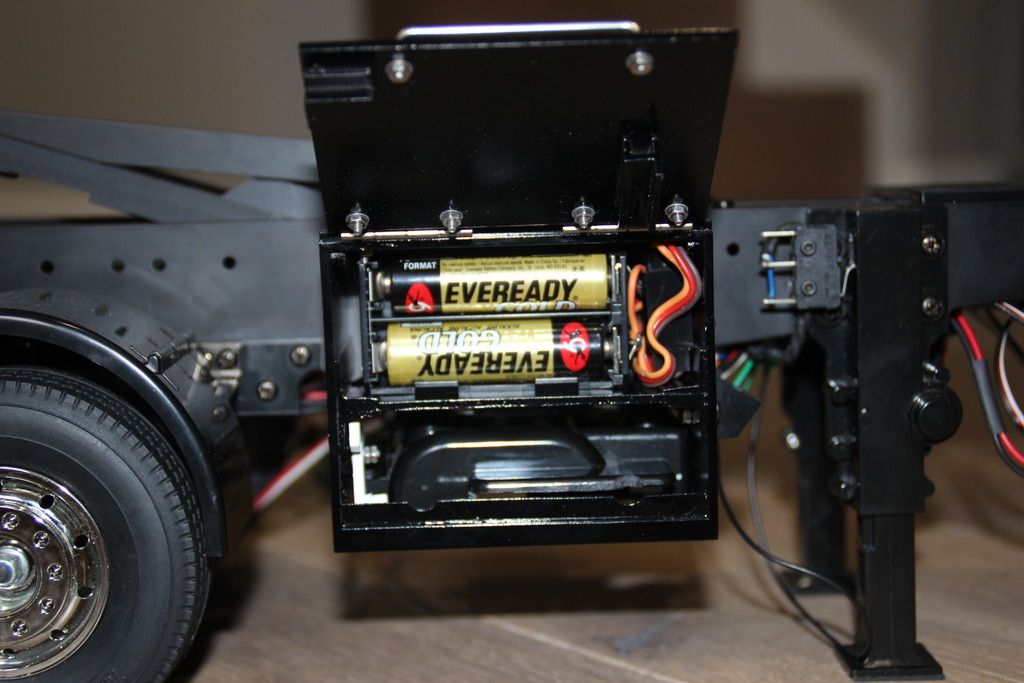
Close up of right hand side 'tool box', contains the battery pack for the motorized legs
Some technical challenges...
1) tipper drive control
I originally designed a relay H-bridge for the tipper control (shown earlier in this thread as a small circuit with 2x blue relays side by side), the advantage being that the motor receives maximum power from the battery. This tested fine in manual 'over-ride' mode, and the relays also worked fine with the wireless control when not hooked up to the motor. I found that with everything connected up for final test, the relays would click on and off at high frequency when using the wireless control....but all still OK in manual over-ride mode. After some head scratching, I realized that the motor is drawing too much current at the instant of being turned on because it is, for a short time, effectively a short circuit (the stationary motor has no electrical resistance...only when the motor starts to turn, thereby creating a back EMF, does it have some electrical resistance). The voltage was drops right down below what is needed for the wireless control board to work (the wireless controller and the motor share the same battery pack), therefore the whole thing was shutting down, relay turns off, voltage goes back to 7.2V, then the relay comes back on and the cycle starts again. Testing with separate batteries for motor and wireless controller, which worked fine, proved the point....
So, I've had to revert to finding a basic speed controller with limit switch inputs for both directions (my motor and screw drive is powerful enough to do some damage if it over-runs the mechanical limits of the tipping mechanism!)
http://www.robotpower.com/products/wasp_info.html
The speed controller prevents the initial current surge to the motor, thereby making sure that the wireless controller will always have enough power from the same shared battery.
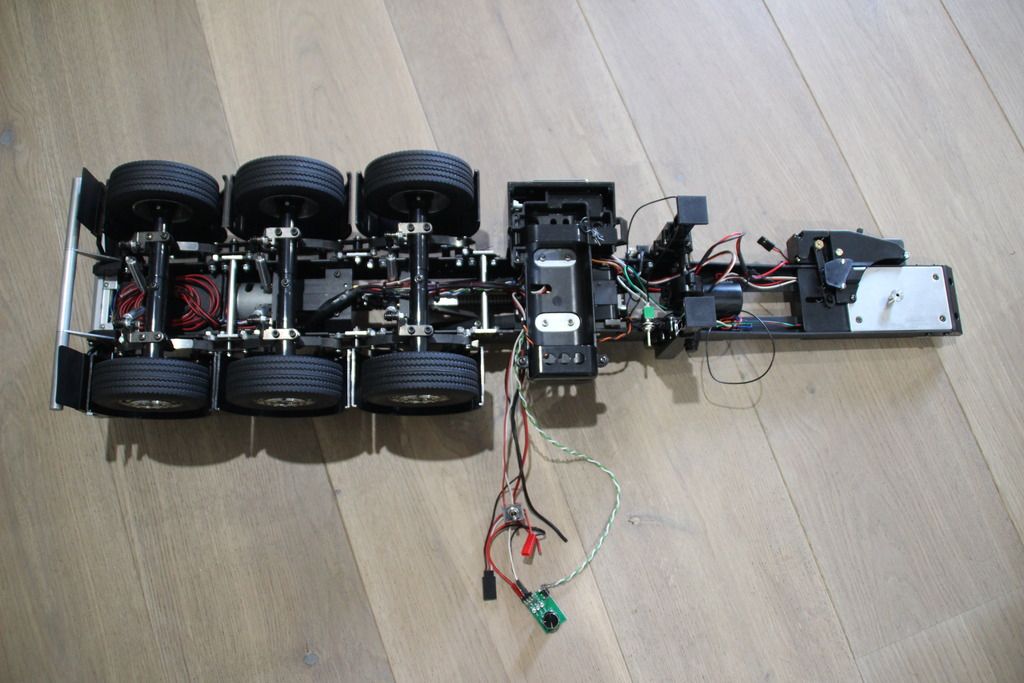
It also means that I've had to completely rebuild the manual over-ride control, which now consists of a servo tester which can provide a signal to the ESC instead of the wireless controller. You can see this at the bottom of the pic of the underside of the trailer. This will all get built into the left side 'tool box'.
Learning point....for big fat motors, use a dedicated power supply if using a direct 'switched' control (like a relay) to protect anything else from current surges. Otherwise ESC is the way to go.
2) axle heights
this chassis was based on the container trailer, with the whole axle set moved forwards by 1 axle spacing. If you have a container trailer, you may have noticed that the front axle is often just off the ground because I don't think Tamiya quite got the axle heights right. Effectively, the trailer isn't quite horizontal when hooked up to a prime mover and the suspension doesn't allow for the difference to be absorbed. This design problem becomes more obvious with a shorter trailer (like I now have), since the chassis sits at more of an angle. So I added some spacers between the axles and the springs to allow the trailer to sit at the right angle whilst also allowing full movement in the suspension. Without the spacers, the suspension system does take up -some- of the inequality but it is then limited as to how much more movement exists for a bumpy road surface. So no spacers on the rear axle, 3mm spacer on the middle axle and 6mm spacer on the front axle. This is why there is more clearance between the wheel and the arch at the front axle compared to the rear axle. It also meant that the king pin was a the right height for the auto-support legs to work, which are sensitive to too much variation with the height of the coupler on the prime mover....
Next update....hope to have chassis fully built, all wiring installed and tested. Yet to get the bin powder coated (white)